sprzedaż produktów i usług z zakresu utrzymania maszyn
A(M)Cademy of VIBROdiagnostics
#2 Co to jest RMS i po co go liczymy?
W analizie drgań często pojawiają się opisy wskazujące, jaką wartość drgań mierzymy, np. PP, ZP, RMS, VRMS, EnvRMS, EnvPP. Jest to bardzo ważne w praktyce, bo w zależności od przyjętego sposobu pomiaru, te same drgania będą opisywane różnymi wartościami. Warto wiedzieć, czym się różne wartości różnią i jak je porównywać.
Najpierw warto jednak spytać: ale po co w ogóle stosować takie wartości opisowe, jak już mierzymy drgania?
Powodem jest fakt, że pomiar drgań jest pomiarem wielkości dynamicznej, która zmienia się cały czas. Różni się więc zasadniczo od pomiaru wartości statycznych, np. temperatury. Jeżeli mierzymy temperaturę przez 1s, dostaniemy jedną wartość liczbową, powiedzmy 45,8 °C. W przypadku pomiaru drgań w ciągu 1s urządzenie wykona tyle pomiarów, ile wynosi częstotliwość próbkowania, a są to wielkości rzędu kilkunastu kHz. Tak więc, dla częstotliwości 25 kHz, nasz przyrząd zmierzy 25 tysięcy liczb. Nie ma najmniejszego sensu pokazywać wszystkie te wartości na wyświetlaczu – użytkownik oczekuje jednej wartości, która pokaże na ile „duże” są drgania. Tych metod jest co najmniej kilka, dziś opiszemy najpopularniejszą z nich.
W pierwszym poście opisaliśmy różne wielkości fizyczne: przyspieszenie, prędkość i przemieszczenie drgań mechanicznych. Dla każdej z tych wartości możemy podać amplitudę drgań. Albo będzie to różnica pomiędzy najmniejszym i największym chwilowym poziomem drgań (tzw. amplituda „Peak-Peak” PP) albo połowa tej wielkości (tzw. amplituda „Zero-Peak” ZP).Amplituda nie jest jednak najpopularniejszą miarą drgań. Zdecydowanie najczęściej używana jest wartość opisywana jako „RMS” i o niej będzie dziś mowa.
Chociaż formalnie wskaźnik RMS ma bardzo precyzyjną definicję związana ze statystycznym opisem sygnałów okresowych (szczególnie w analizie sygnałów elektrycznych), to w praktycznej analizie sygnałów drgań można powiedzieć, że jest to najpopularniejsza wartość liczbowa opisująca średni „poziom drgań” danej maszyny. Inżynier elektryk albo elektronik nazwie to „wartością skuteczną” sygnału.
Jak policzyć RMS?
Znaczenie wskaźnika RMS jest opisane w samej jego nazwie, tj. Root Mean Square. Człon Root mówi, że (w ostatnim kroku) obliczamy pierwiastek, drugi człon Mean mówi, że obliczamy wartość średnią, a trzeci Square, że każda wartość sygnału jest podniesiona do kwadratu, jak pokazano na Rys. 1.
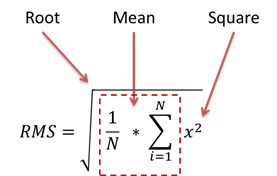
Rysunek 1 Obliczanie wartości skutecznej RMS
Jak widać z Rysunku 1, kolejność operacji na sygnale jest odwrócona względem kolejnych liter skrótu RMS, tj. obliczając wartość RMS sygnału cyfrowego, najpierw podnosimy wszystkie wartości do kwadratu (Square), potem obliczamy wartość średnią Mean (sumujemy kolejne wartości i dzielimy przez ich ilość, a na końcu obliczamy pierwiastek z tej wartości (Root).
Dlaczego RMS sygnału jest mylony z energią sygnału?
Bardzo często się zdarza, że w żargonie przemysłowym wskaźnik RMS i pojęcie „energii” sygnału są używane zamiennie – co nie stanowi problemu dla praktyków, ale może prowadzić do różnic w ścieżkach przetwarzania sygnałów (np. porównywanie wartości z dwóch różnych systemów). W Tabeli 1 zestawiono wskaźnik RMS wraz z kluczowymi pojęciami pokrewnymi – mocą i energią sygnału.
Tabela 1 Zestawienie wskaźników
| Nazwa wskaźnika | Sposób obliczania | Zależność |
| Energia sygnału | E=∑▒x^2 | Suma kwadratów |
| Moc sygnału | P=1/N*∑▒x^2 | Znormalizowana Energia |
| RMS sygnału | RMS=√(1/N*∑▒x^2 ) | Pierwiastek z Mocy |
Gdzie N – liczba punktów w sygnale cyfrowym
RMS komponentów sinusoidalnych
Jak wskazuje Tabela 1, Energia sygnału okresowego (lub szerzej stacjonarnego) rośnie proporcjonalnie do jego długości (czasu trwania T dla sygnałów analogowych albo ilości próbek N dla sygnałów cyfrowych), a więc nie nadaje się do oceny stanu technicznego, bo wystarczy skrócić sygnał, aby uzyskać wartość wskaźnika „zgodną z normą”1. Śledzenie Mocy sygnału w wielu wypadkach dobrze opisywałoby stan maszyny, ale warto zauważyć, że im wartości szczytowe sygnału są „dalej” od wartości 1, tym wynik Mocy jest trudniejszy w zapisie (a tym samym interpretacji). Z kolei wskaźnik RMS w prosty sposób szacuje wartość poziomu drgań niezależnie od wartości amplitudy, co pokazano na Rysunku 21 Kwadrat wartości sygnału we wzorach na Energię, Moc i RMS sygnału jest istotny nie tylko z uwagi na ujemne wartości sygnałów ale również z uwagi na możliwość analogicznych obliczeń w dziedzinie częstotliwości (zob. Twierdzenie Parsevala lub Twierdzenie Plancherela).
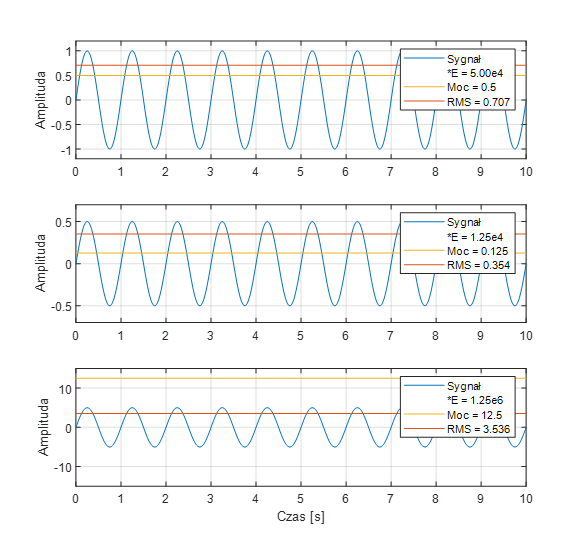
Rysunek 2 Wartości Energii, Mocy i RMS sygnału dla poziomów amplitud Zero-Peak 1, 0.5, 5
Sygnał harmoniczny i sygnał rzeczywisty
W poprzedniej sekcji wykazano, że RMS jest dobrym wskaźnikiem opisującym poziom drgań, niezależnie od wartości sygnału. Teraz pokażemy, jak RMS zachowuje się dla sygnałów różnej klasy, kolejno na przykładzie sygnału złożonego z komponentów harmonicznych oraz dwóch przykładów sygnałów rzeczywistych – jeden z niewyważonej maszyny wirnikowej, a drugi z kompresora tłokowego z uszkodzonym łożyskiem.
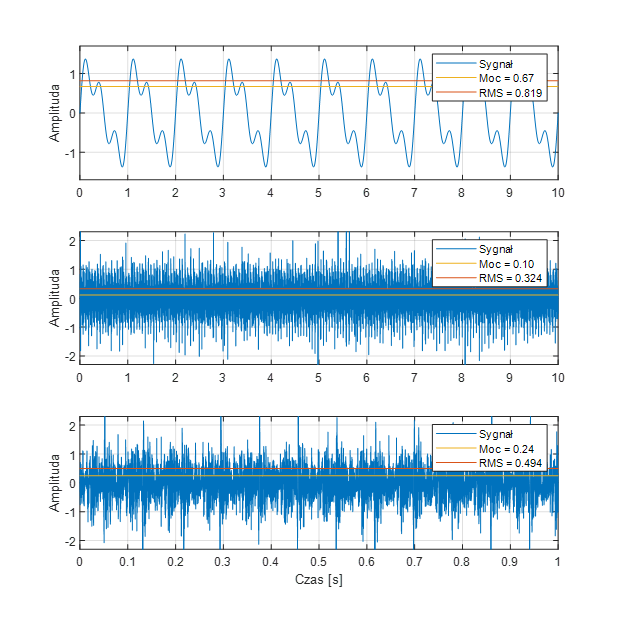
Rysunek 3 RMS dla sygnałów różnych klas: sygnału złożonego z komponentów harmonicznych, sygnału z niewyważonej maszyny wirnikowej, sygnału z kompresora tłokowego z uszkodzonym łożyskiem
Porównując dolny wykres z Rysunku 2 z wykresami sygnałów rzeczywistych z Rysunku 3 łatwo zauważyć, że stosunkowo duże zmiany w poziomie mocy sygnału zależą nie tylko od jego wartości szczytowej, ale również od jego charakteru, czyli rozkładu widmowego, podczas gdy wartości wskaźnika RMS jest bardziej przewidywalna dla sygnałów okresowych dowolnej klasy, z czego wynika że RMS jest wskaźnikiem wygodniejszym w użyciu.
RMS w praktycznej ocenie stanu technicznego
W ramach oceny stanu technicznego maszyn na podstawie poziomu drgań, wskaźnik RMS używany jest na kilka sposobów, głównie jako:
- RMS sygnału prędkości (Velocity RMS – w skrócie „VRMS”) zgodnie z normami drgań
- RMS sygnału przyspieszenia
- RMS obwiedni sygnału przyspieszenia
- RMS sygnału prędkości lub sygnału przyspieszenia w paśmie zdefiniowanym przez użytkownika
Zgodnie z normami drganiowymi (VDI 3834, ISO 10816, ISO 20816), dopuszczalne wartości drgań maszyn są określone głównie dla wartości RMS sygnału prędkości drgań z dwóch powodów. Po pierwsze, historycznie, pierwsze pomiary drgań maszyn wirnikowych wykonywane były z użyciem elektrodynamicznych czujników prędkości drgań, dla których zgromadzono bardzo liczne dane i długie doświadczenia. Po drugie, prędkość drgań najwierniej reprezentuje niebezpieczne siły działające na maszynę w najszerszym paśmie częstotliwości (zob. Post #1 – PRZYSPIESZENIE DRGAŃ, PRĘDKOŚĆ I PRZEMIESZCZENIE). W zależności od mocy elektrycznej maszyny, jej nominalnej prędkości obrotowej i rodzaju posadowienia, dopuszczalna wartość VRMS mieści się w ogólnym przedziale do 4.5 – 28 mm/s.
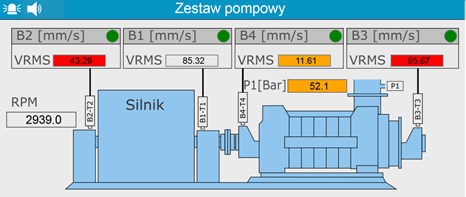
Rysunek 4 Widok typu „Mimic screen” instalacji przemysłowej w systemie AVM4000
Rysunek 4 ilustruje przykładowe użycie wskaźnika VRMS w wykryciu niedopuszczalnych poziomów drgań pompy przemysłowej. Wartości zaznaczone kolorem szarym są bezpieczne, wartości zaznaczone kolorem żółtym wskazują na początek rozwoju uszkodzenia, a wartości zaznaczone kolorem czerwonym informują, że maszyna powinna być niezwłocznie odstawiona i naprawiona. W nowoczesnych przeglądarkach danych, takich jak VIBnavigator, kliknięcie na kolorowe pole wskaźnika wyświetla wykres historyczny do dalszej analizy, taki jak przedstawiono na Rys. 5.
UWAGA! Możliwość odniesienia wartości wskaźnika VRMS bezpośrednio do dopuszczalnej wartości z normy stanowi o priorytetowym znaczeniu tego wskaźnika względem innych wskaźników.
UWAGA! Istnieje druga grupa norm opisujących pomiary wiroprądowymi czujnikami przemieszczenia drgań (czujniki wiroprądowe, proximitory), o których dzisiaj nie mówimy. Są one dużo droższe i są stosowane najczęściej w dużych maszynach z łożyskami ślizgowymi (np. turbozespoły energetyczne).
RMS sygnału przyspieszenia jest kolejnym, bardzo popularnym wskaźnikiem diagnostycznym. Chociaż nie daje on tak jednoznacznej oceny stanu technicznego jak wskaźnik VRMS, to z reguły jest skuteczniejszy w wykrywaniu wczesnych symptomów uszkodzenia, szczególnie istotnych uszkodzeń łożysk tocznych i przekładni zębatych. Niestety, z uwagi na bardzo duże zależności poziomu RMS od poziomu szumu, charakteru pracy maszyny i konkretnej aparatury pomiarowej, RMS sygnału przyspieszenia nie posiada ogólnie przyjętych wartości progowych, a więc jest wskaźnikiem względnym.
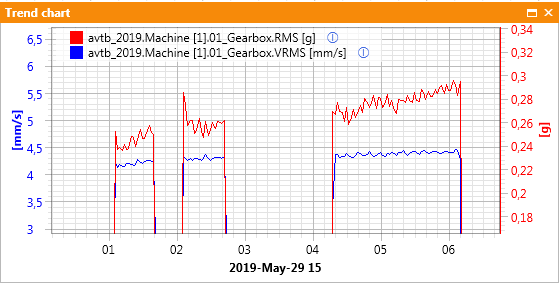
Rysunek 5 Przykładowe wykresy wskaźników RMS i VRMS rozwijających się uszkodzeń maszyny
Należy pamiętać, że w ramach detekcji uszkodzeń w początkowej fazie rozwoju, wskaźnik VRMS jest szczególnie skuteczny w wykryciu uszkodzeń, które manifestują się generowaniem komponentów w niskich częstotliwościach (typowo w zakresie 2Hz-500Hz), a więc głównie wałów napędowych. W przypadku wczesnej fazy uszkodzeń elementów maszyn generujących drgania w wyższych częstotliwościach, wskaźniki RMS z sygnału przyspieszenia są z reguły skuteczniejsze, co wykazano na przykładzie drgań przekładni na Rys. 5.
RMS obwiedni sygnału przyspieszenia jest stosowany do wczesnego wykrywania zmian (wzrostów) w drganiach strukturalnych maszyny. Z tego powodu, jest bardzo cenny we wczesnym wykrywaniu uszkodzeń łożysk tocznych, szczególnie w przypadku, kiedy nie są znane ich dane geometryczne (tj. kiedy nie można dokładnie zidentyfikować, jakie łożyska są zamontowane i jakie mają częstotliwości charakterystyczne).
RMS w zdefiniowanym paśmie jest wskaźnikiem pozwalającym śledzić wybrany komponent widmowy, który odpowiada konkretnemu wałowi, przekładni, łopatkom (np. konkretnemu stopniu turbiny), czy konkretnemu elementowi łożyska tocznego (bieżnia wewnętrza albo zewnętrzna, element toczny, koszyk). W ramach monitorowania wałów i przekładni różnego rodzaju, najczęściej stosuje się analizy wąskopasmowe sygnału przyspieszenia i prędkości, a w ramach monitorowania łożysk tocznych, stosuje się wyłącznie analizy wąskopasmowe sygnału przyspieszenia.
Zastosowanie aparatury pomiarowej
Firma AMC VIBRO oferuje pomiar wskaźnika RMS z wykorzystaniem nowoczesnych urządzeń serii AVM1000, AVM2000 oraz AVM4000. Seria AVM1000 to 1-kanałowe proste w obsłudze systemy umożliwiające pomiar wskaźnika RMS sygnału przyspieszenia oraz sygnału prędkości. Seria AVM2000 dodatkowo umożliwia analizę sygnału obwiedni z sygnału przyspieszenia oraz wyznaczenie mocy w wyznaczonych pasmach częstotliwościowych zarówno dla sygnału przyspieszenia, jak i prędkości. Produkt AVM4000 umożliwia obliczenia wskaźnika RMS, mocy i innych z dowolnie wybranej wielkości fizycznej sygnału, tj. zarówno przyspieszenia drgań, prędkości, jak również przemieszczenia w dowolnie zdefiniowanym paśmie. Zestawienie zilustrowano w Tabeli 2.
| AVM 1000 | AVM 2000 | AVM 4000 | |
| RMS przyspieszenia | ✔️ | ✔️ | ✔️ |
| RMS prędkości | ✔️ | ✔️ | ✔️ |
| RMS przemieszczenia | ✔️ | ||
| RMS obwiedni sygnału przyspieszenia | ✔️ | ✔️ | |
| Moc2 z pasma sygnału przyspieszenia | ✔️ | ✔️ | |
| Moc3 z pasma sygnału prędkości | ✔️ | ✔️ | |
| Moc z pasma sygnału przemieszczenia | ✔️ | ||
| RMS z pasma sygnału przyspieszenia | ✔️ | ||
| RMS z pasma sygnału prędkości | ✔️ | ||
| RMS z pasma sygnału przemieszczenia | ✔️ |
1Kwadrat wartości sygnału we wzorach na Energię, Moc i RMS sygnału jest istotny nie tylko z uwagi na ujemne wartości sygnałów ale również z uwagi na możliwość analogicznych obliczeń w dziedzinie częstotliwości (zob. Twierdzenie Parsevala lub Twierdzenie Plancherela).
2Istnieje możliwość zmiany obliczeń Mocy na RMS
3Istnieje możliwość zmiany obliczeń Mocy na RMS
Polecamy